



6-Axis Education or Articulated Robot Arm Diy Delta or Camera Robot Arm
Specification
Axe:6
Barkirina herî zêde: 4 kg
Cihê dubare: ± 0.01mm
şilbûna bikaranînê: 20-80%
jîngeha sage:0℃-45℃
Sazkirin: erd
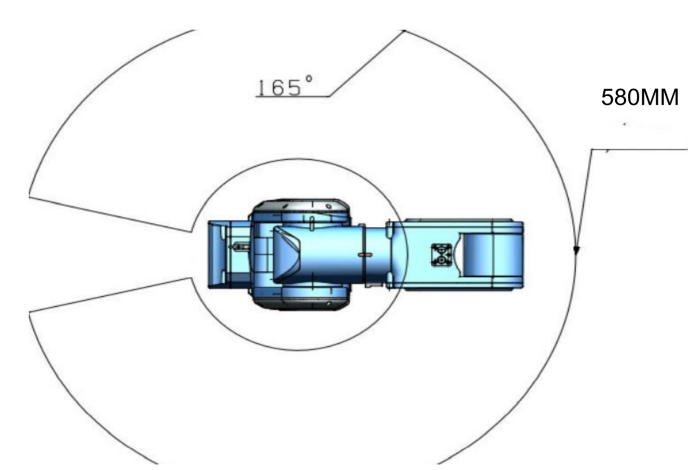
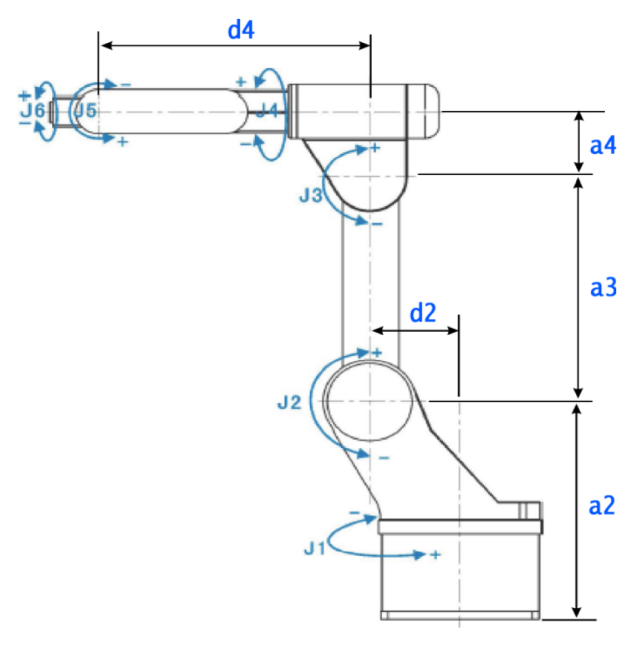
Rêjeya xebatê: J1: ± 165 °
J2: -100°~+120°
J3: + 150° ~ -60°
J4:±175°
J5: + 130° ~ -30°
J6:±180°
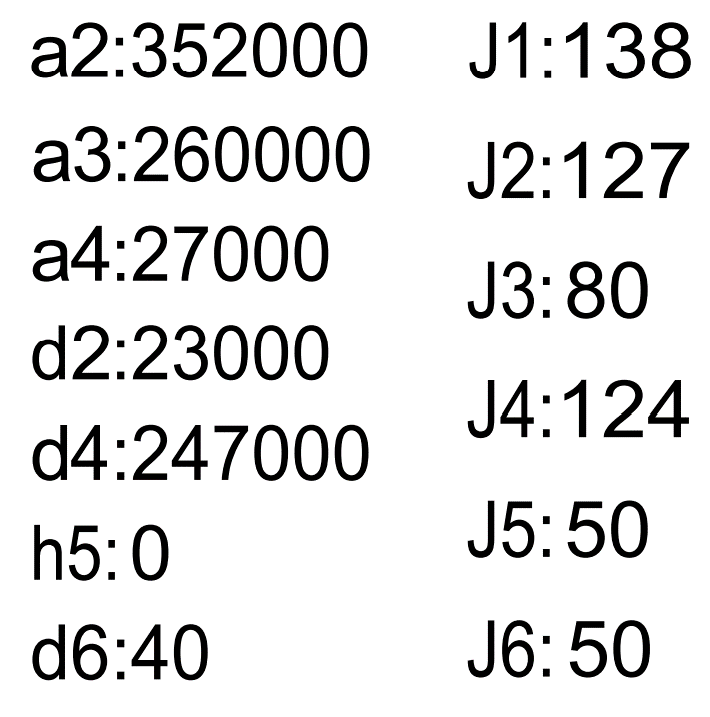
Leza herî zêde: J1: 260°/s
J2:250°/s
J3:250°/s
J4:250°/s
J5:200°/s
J6:760°/s
qada xebatê:
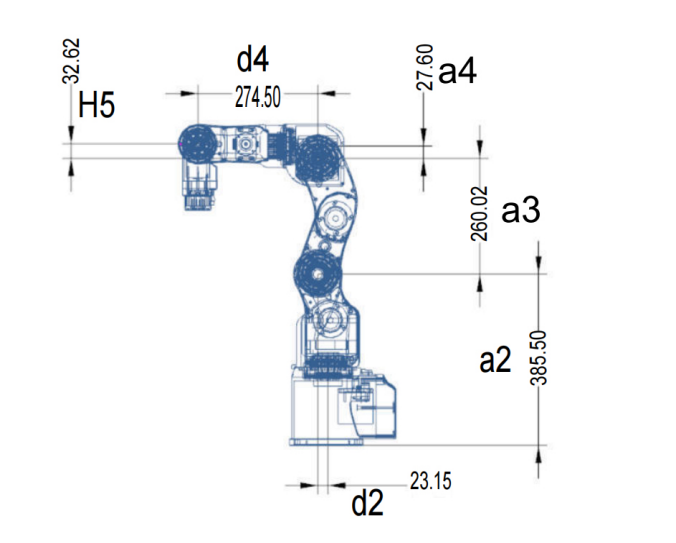
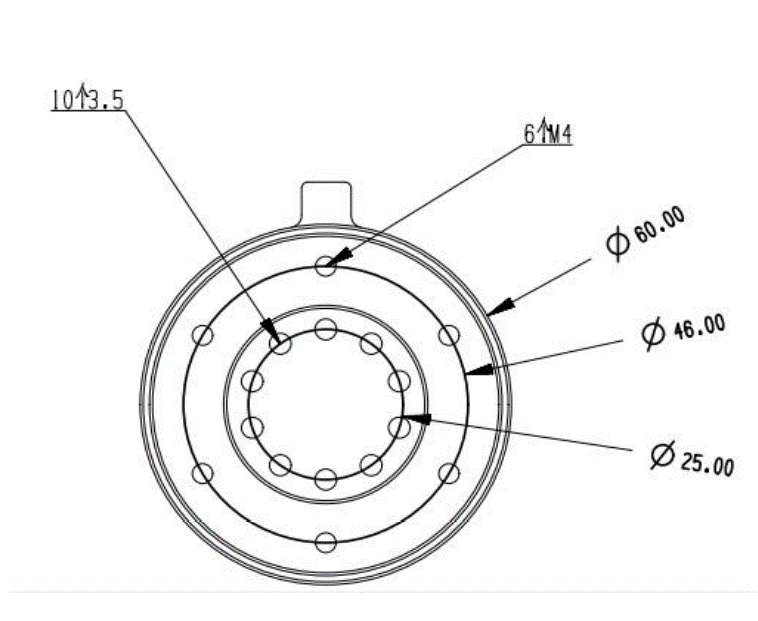
sazkirina bingehîn:
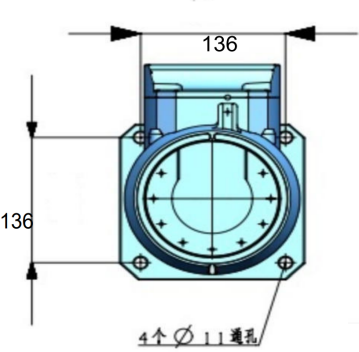
sazkirina bingehîn:
Applications
Serlêdanên Perwerdehiyê:
1. Ji bo lêkolîna pêkhateya bingehîn a pergala robot.
2. Ji bo lêkolîna fonksiyonên bernamekirin û hînkirinê ya robot hînkirina pendant.
3. Ji bo xwendina zanîna bingehîn a bernamesaziya negirêdayî robot.
4. Ji bo lêkolîna xebitandin û bernameya serîlêdanê ya robot io.
5. Ji bo lêkolîna sepanên dîtbarî yên robotan
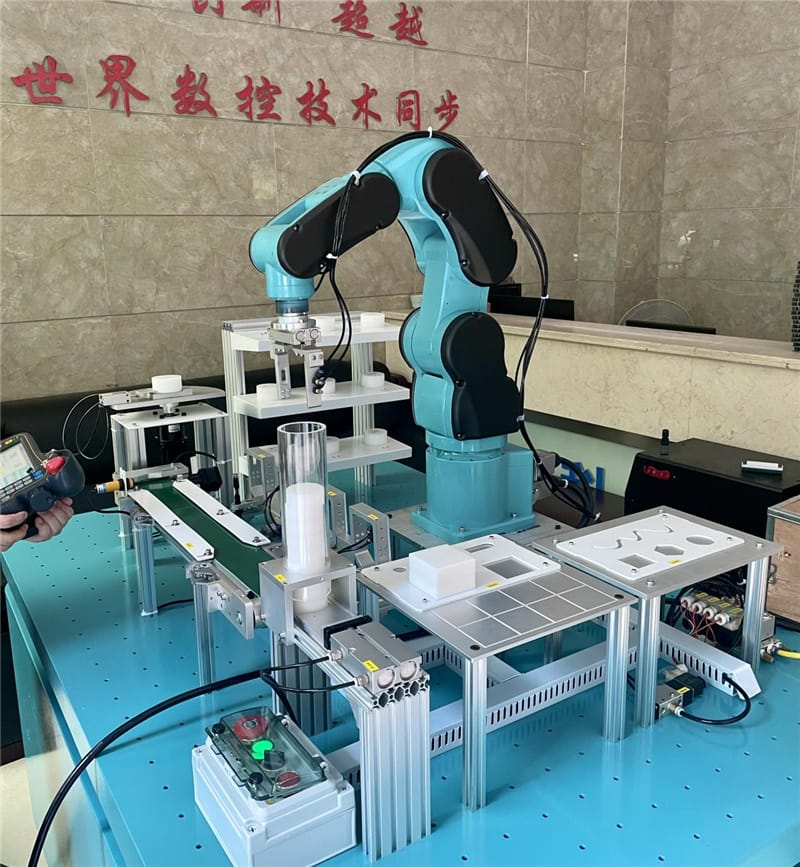
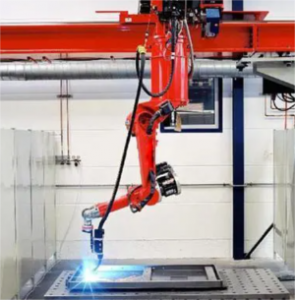
Dîmenên bazirganiyê: Robot berfê Robot Bartender Robot qehwe Robotê şîrê çaya Dîmenên pîşesaziya sivik: Pîvana Teftîşa Dabeşkirinê Rêzkirin
Taybetmendiyên Hilberê
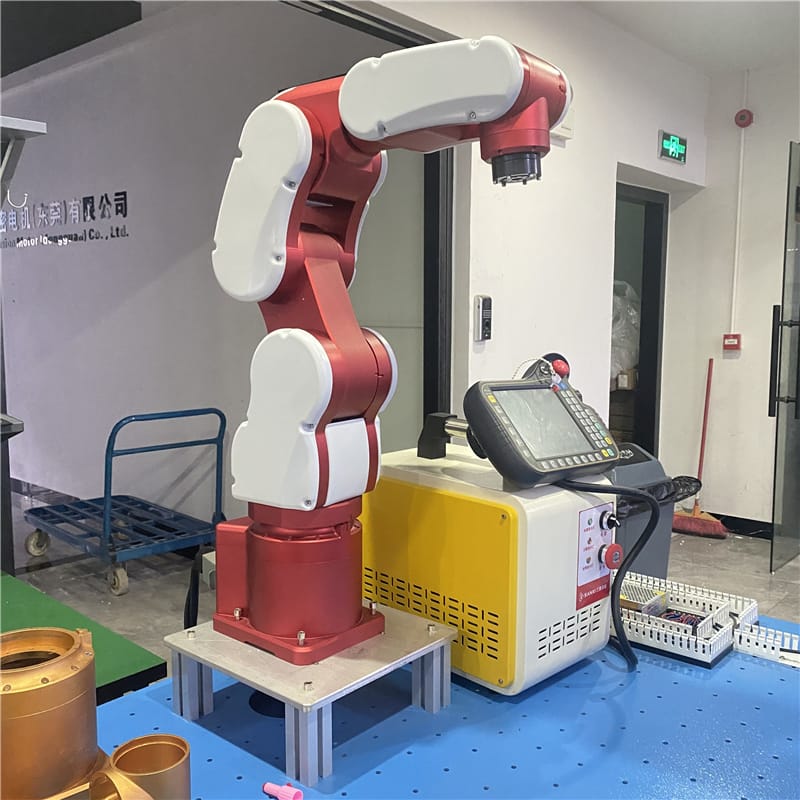
Armê Robotîk: Destê robotîk bi navgîniya navenda makînekirina CNC-ê ji rijandinên aluminiumê tê çêkirin, û rû bi plastîk tê rijandin û xwedan xuyangek xweşik e.
Hola Kabloya Reserved: Destê robotê kunên kabloyê veqetandiye, ku xweşik in û xebata manipulatorê asteng nakin. Dawiya trakeyê ji bo port û girêdana kabloya daneyê ve hatî veqetandin.
Panela Kontrolker: Dîmendera LCD-a ekrana mezin, rêbaza pêşandana ziman dikare li ser bingeha hewcedariyên xerîdar, xebitandin û bernamesazkirina hêsan û zelal, bi guheztina parametreyên serhêl û fonksiyonên xwe-teşhîskirina xeletiyê ve girêdayî be.
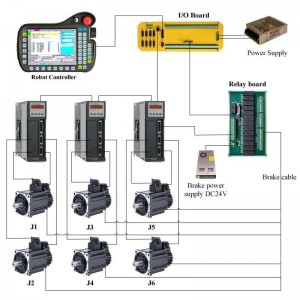
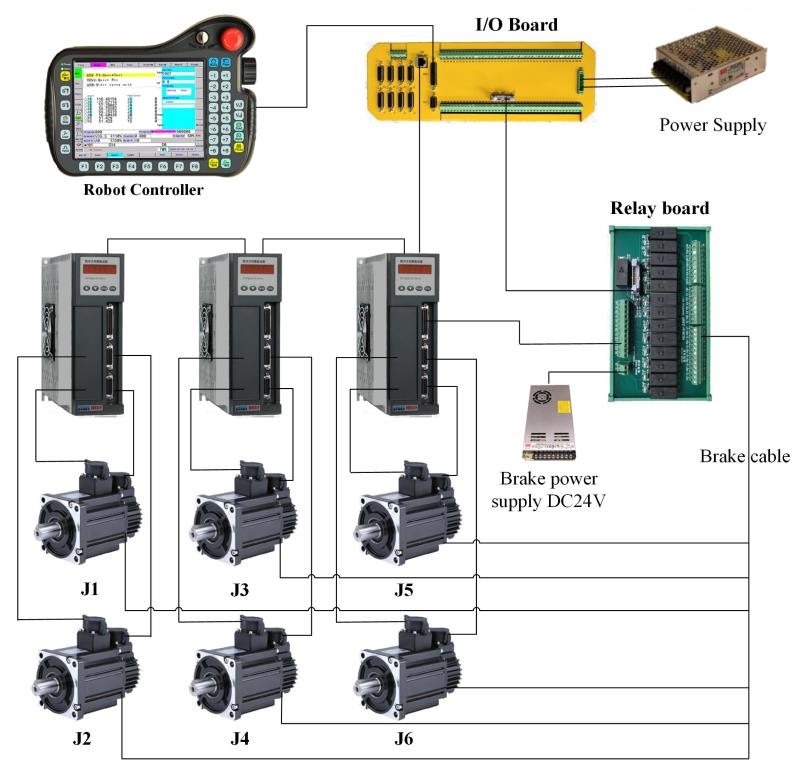
Kabîneya Kontrola Robotê: Pergala kontrolkirina tevgerê ya aqilmend teknolojiya komputera pîşesaziyê qebûl dike, û modula servo ya hemî-dîjîtal hêza ajotinê ji bo motorên servo AC yên her yekîneya robot peyda dike.
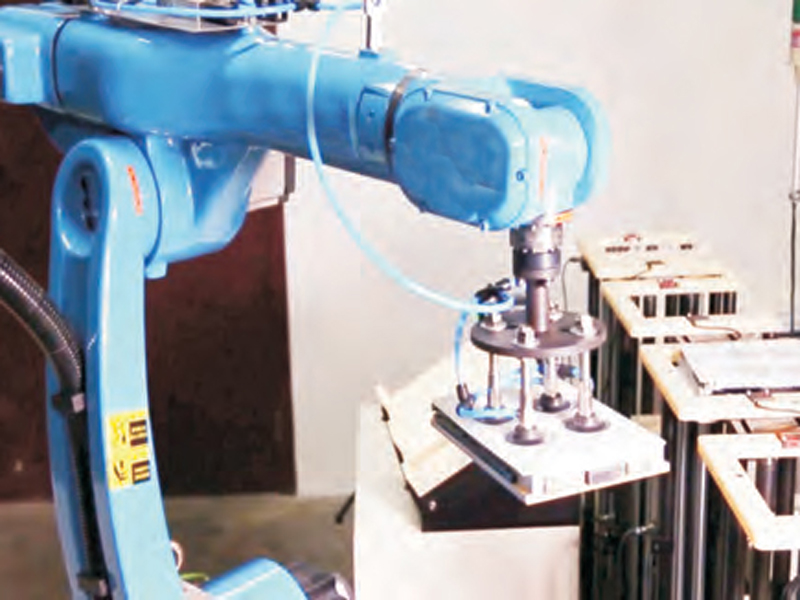
Tesîsên Robotîk: Amûra amûrê dikare li gorî hewcedariyên xwerû giranî û mîqdarek cihêreng hilbijêrin, û ew li ser flana paşîn tê saz kirin, ku hêsan eyar e û xwedan cûrbecûr karanînê ye.